Engineers in the US have created a navigation system for self-driving cars that can guide itself on unmapped roads.
Current systems used in driverless car tests tend to rely on 3D maps created through multiple scans of roads and their surroundings so that every obstacle and characteristic has been correctly labelled.
Now a team from the Massachusetts Institute of Technology (MIT) has come up with a new system that just uses GPS and a range of sensors so a driverless car can identify its surroundings and monitor road conditions, effectively learning the roads as it drives.
The result is that vast amounts of unmapped roads in the US can be used to test autonomous vehicles, the developers say, because their system does not rely on the well-mapped roads of urban areas that are used by autonomous car testers.


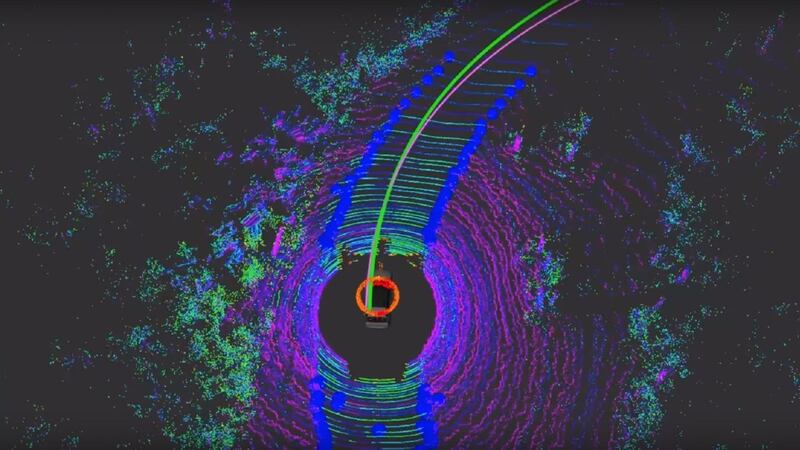
Their system, called MapLite, is built around basic GPS which combines with sensors on the car to observe road conditions as the car moves.
This data is used to plot the road more than 100ft in advance, helping to keep the car on track.
“The reason this kind of ‘mapless’ approach hasn’t really been done before is because it is generally much harder to reach the same accuracy and reliability as with detailed maps,” said Teddy Ort, lead author of the research paper on the technology and an MIT graduate student.
“A system like this that can navigate just with onboard sensors shows the potential of self-driving cars being able to actually handle roads beyond the small number that tech companies have mapped.”
A number of technology and automotive firms are testing or developing autonomous vehicle technology, including Google and Uber as well as car giants such as BMW, Toyota and Audi.





